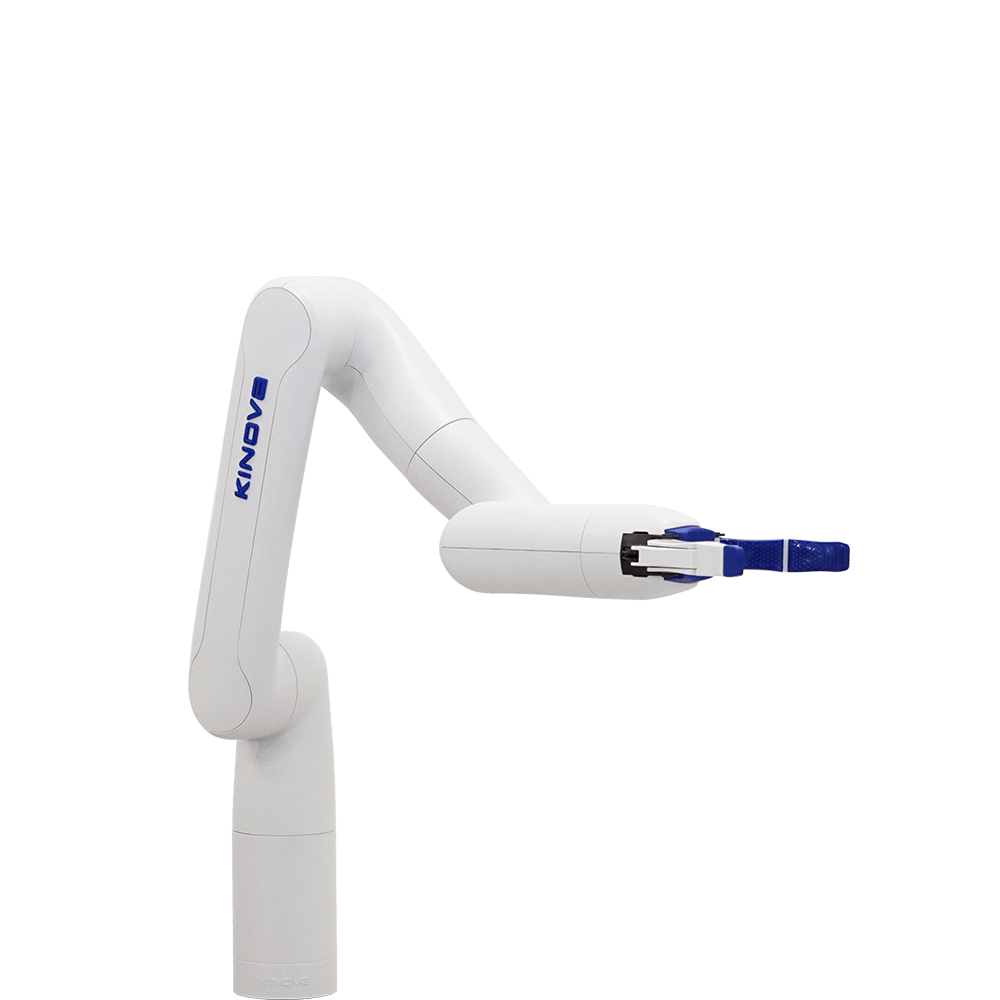
THÔNG SỐ KỸ THUẬT – ROBOT
– Trọng lượng: 5.4 kg
– Tải trọng:
+ 600 g (tầm trung, liên tục)
+ 1000 g (hết tầm với, ngắn hạn)
+ 500 g (hết tầm với, liên tục)”
– Tầm với tối đa (vươn ra hoàn toàn): 760 mm (đến tham chiếu tâm tay kẹp)
– Tốc độ dịch chuyển theo tọa độ đề-các cực đại: 50 cm/s (mức thấp), 30cm/s (mức cao)
– Số bậc tự do: 6 DoF
– Các bộ chấp hành:
+ Nhỏ – Các bộ chấp hành: 4,5,6
+ Trung bình – Các bộ chấp hành: 1 và 3
+ Lớn – Bộ chấp hành: 2
– Các nút tương tác cổ tay điện dung: Số lượng: 2 (lập trình được)
– Điện áp nguồn cung cấp: 18 đến 30 VDC (24 VDC định mức)
– Công suất tiêu thụ của robot:
+ 20 W (trung bình)
+ 100 W (đỉnh)
– Vật liệu:
+ Nhôm
+ Polycarbonate, ni lông cường lực
– Điều khiển và truyền thông nội bộ: Ethernet (100 Mbps)
– Nhiệt độ môi trường làm việc: 0 đến 40 độ C
– Bảo vệ chống xâm nhập rôbot: IP22
THÔNG SỐ KỸ THUẬT – PHẦN MỀM/ĐIỀU KHIỂN
– Điều khiển mức thấp: Vị trí, tốc độ, dòng điện
– Điều khiển mức cao: Xoắn theo tọa độ đề-các (tốc độ thẳng & góc), tốc độ khớp
– Đặc điểm điều khiển mức cao (phụ thuộc chế độ): Các vùng bảo vệ – xử lý hình chữ nhật, hình cầu, hình trụ
– Các chế độ phục vụ: Mức cao, mức thấp
– Kết nối: USB micro: Ethernet qua RNDIS
– USB-A: Kết nối bộ điều khiển & thiết bị sạc khi kết nối USB sang Ethernet (RJ45) Dongle
– Hỗ trợ phân phối ROS: Kinetic Kame
– Thời gian khởi động: 30 giây
– Tần số truyền thông nội bộ: 1 kHz






 Gọi điện
Gọi điện SMS
SMS Chỉ Đường
Chỉ Đường